
Controlador do Motor da Esteira - fl3xbl0w
Projeto de engenharia reversa. Começou com a esteira Bowflex Treadmill 22, mas acabou se generalizando para qualquer máquina com Android vendida pela Nautilus Inc. (Nautilus, Bowflex, Schwinn).
Esta aplicação se refere principalmente à Treadmill 22 & Treadmill 56.
A placa de controle do motor é fabricada pela Electronics Way Industry.

Considerando o manual de serviço fornecido pela Nautilus Inc. (backup no archive.org):

E focando especificamente nesta parte:

Podemos identificar o “cabo de comunicação” que conecta o controlador do motor como um de 5 pinos. Há apenas um conector de 5 pinos. Etiquetei os cabos com suas cores correspondentes (os dados & interruptor estão optoisolados):
| Cor do cabo | Etiqueta |
|---|---|
| vermelho | GND |
| branco | RXD |
| preto | TXD |
| amarelo | +12 |
| verde | SW |
A placa não está conectada diretamente ao console Android.
O único conector de 5 pinos é da marca Molex. Uma busca no Google por “conectores Molex pequenos” me levou a uma imagem do que chamam de Molex Micro-Fit 3.0 Single Row (5-Pin), que é utilizado para conectar a placa controladora do motor:

Ao dar uma olhada no NautilusLauncher.apk através do jadx-gui, posso ver que eles comunicam o tablet Android com seu “Console Universal” usando Serial a 230400 Bauds (usando /dev/ttyS4). ISSO NÃO é o que estamos analisando aqui. Isso se refere à comunicação entre Android e o “Console Universal”. Investigamos a comunicação entre a “Placa controladora da botoneira” e a “Placa controladora do motor”, eliminando assim três placas como possíveis pontos de falha.
Tentar conectar um ESP32 ou uma ponte Serial baseada em CH340 diretamente aos cabos entre a base da esteira e a placa controladora Bowflex fez com que a base da esteira não inicializasse corretamente, após o que adquiri um analisador lógico para investigar mais a fundo.
Atualização 2025
Nas últimas semanas, e quase três anos depois de ter começado com isso, várias pessoas entraram em contato comigo para perguntar sobre avanços a respeito disso, confirmando minha suposição inicial de que o sistema da esteira é horrível e que apenas era uma questão de tempo para que as máquinas começassem a falhar. Achei que era um bom momento para colocar em uso meu analisador lógico, que até então estava guardando pó.
Conectando o analisador lógico às linhas TXD e RXD (e GND, é claro), pude imediatamente começar a interceptar mensagens entre ambas as partes sem interromper a comunicação. Presumo que inicialmente não consegui com um ESP32 por questões de impedância. Após alguns minutos de tentativa e erro, cheguei à seguinte configuração Serial:
- 2400 Bauds
- 8 Bits por Quadro
- 1 Bit de Parada
- Sem Bit de Paridade
- Menos Significativo Primeiro
- TXD: Sinal Invertido
- RXD: Sinal Não InvertidoCom essas configurações, pude ver mensagens claramente definidas.
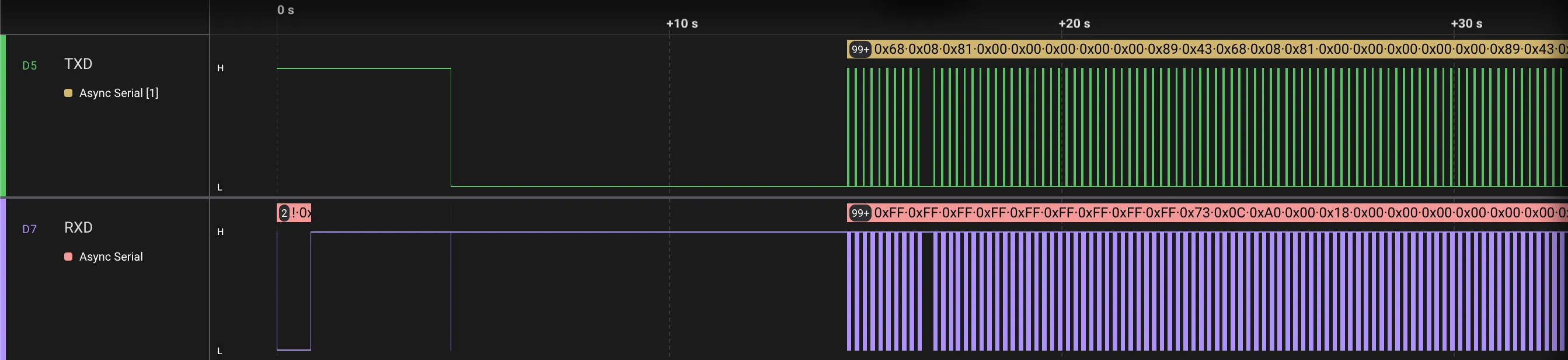
Interceptando mensagens UART no processo de inicialização
Algumas coisas que pude perceber imediatamente:
- Todas as mensagens enviadas pela botoneira começam com
0x68 - Todas as mensagens enviadas pela placa controladora do motor começam com
0x73 - As mensagens de ambas as partes terminam em
0x43 - Em geral, as mensagens da botoneira são enviadas 100ms depois de receber uma mensagem da placa controladora do motor
- Exceto no processo de inicialização, onde em uma instância há uma diferença de 300ms
- O ruído nas linhas de comunicação é incrível, dificultando a leitura das mensagens
Com isso como base, já começa o processo de decifrar as mensagens e entender o que está sendo comunicado entre ambas as partes, realizando mudanças controladas em uma rotina de exercícios.
Interceptando mudanças na velocidade
Realizando mudanças controladas em velocidades específicas, é possível observar os seguintes valores enviados para a placa controladora do motor:
| Velocidade na tela | Mensagem enviada |
|---|---|
| 0,0 km/h (em espera ou pausa) | 0x68 0x08 0x80 0x50 0x00 0x0A 0x00 0x00 0xE2 0x43 |
| 2,0 km/h | 0x68 0x08 0x80 0x50 0x14 0x0A 0x00 0x00 0xF6 0x43 |
| 3,0 km/h | 0x68 0x08 0x80 0x50 0x1D 0x0A 0x00 0x00 0xFF 0x43 |
| 5,0 km/h | 0x68 0x08 0x80 0x50 0x31 0x0A 0x00 0x00 0x13 0x43 |
Pode-se observar que muda o byte 5 e o byte 9. O byte 5 parece ser a velocidade em hexadecimal, e o byte 9 parece ser um checksum.
Convertendo os valores do byte 5 para decimal:
| Velocidade na tela | Hexadecimal | Decimal |
|---|---|---|
| 0,0 km/h (em espera ou pausa) | 0x00 | 0 |
| 2,0 km/h | 0x14 | 20 |
| 3,0 km/h | 0x1D | 29 |
| 5,0 km/h | 0x31 | 49 |
Tendo decompilado algumas partes do sistema Android anos atrás, lembrei que ao configurar a máquina no sistema métrico, internamente o aplicativo da Bowflex realiza a conversão do sistema métrico para imperial para se comunicar com a “UCB”. A placa controladora do motor parece usar o sistema métrico, e aparentemente há perda de precisão na conversão do sistema métrico para imperial e depois de volta para métrico (que é o que a controladora do motor espera), já que tudo é tratado com 1 decimal de precisão. Foi tão difícil fazer isso direito, Nautilus?
Tendo isso em consideração, e se for aplicado um fator de escala de 10, coincide perfeitamente com os valores enviados para a placa controladora do motor, portanto a fórmula seria:
Valor em decimal = Velocidade em km/h × 10Interceptando mudanças na inclinação
Seguindo o mesmo processo que com a velocidade, é possível observar os seguintes valores enviados para a placa controladora do motor:
| Inclinação na tela | Mensagem enviada |
|---|---|
| -5° | 0x68 0x08 0x80 0x50 0x1D 0x00 0x00 0x00 0xF5 0x43 |
| 0° | 0x68 0x08 0x80 0x50 0x1D 0x32 0x00 0x00 0x27 0x43 |
| 9° | 0x68 0x08 0x80 0x50 0x1D 0x8C 0x00 0x00 0x81 0x43 |
Neste caso, o byte 6 parece ser a inclinação em hexadecimal, e confirma que o byte 9 é um checksum.
Convertendo os valores do byte 6 para decimal:
| Inclinação na tela | Hexadecimal | Decimal |
|---|---|---|
| -5° | 0x00 | 0 |
| 0° | 0x32 | 50 |
| 9° | 0x8C | 140 |
A fórmula que faz coincidir perfeitamente os valores enviados para a placa controladora do motor é:
Valor em decimal = (Ângulo + 5) × 10Checksum
Este parece ser um checksum simples e padrão em microcontroladores, somando todos os bytes da mensagem e ocorrendo um overflow ao chegar a 256. Uma representação simples seria algo como:
uint8_t calculateChecksum(uint8_t *msg) {
return msg[1] + msg[2] + msg[3] + msg[4] + msg[5] + msg[6] + msg[7];
}Ao utilizar uint8_t como tipo de retorno, o overflow ocorre naturalmente. Poderia ser utilizado um for loop somando os valores e retornando sum % 256, mas seria mais lento para os microcontroladores sem nenhum benefício real.
Próximos passos
- Obter um entendimento lógico do processo de inicialização, ou pelo menos replicá-lo
- Capturar interações da chave de segurança (a coisa vermelha que é colocada na roupa)
- Interpretar as mensagens que a placa controladora do motor envia, que não devem diferir muito das mensagens que a botoneira envia
Tendo isso, já é possível replicar o funcionamento da botoneira, e com isso controlar a esteira a partir de um microcontrolador.
— Continua —