
Controller del Motore del Tapis Roulant - fl3xbl0w
Progetto di ingegneria inversa. È iniziato con il tapis roulant Bowflex Treadmill 22 ma si è concluso generalizzandosi per qualsiasi macchina con Android venduta da Nautilus Inc. (Nautilus, Bowflex, Schwinn).
Esso si applica principalmente al Treadmill 22 & Treadmill 56.
La scheda di controllo del motore è prodotta da Electronics Way Industry.

Dato il manuale di servizio fornito da Nautilus Inc. (back up su archive.org):
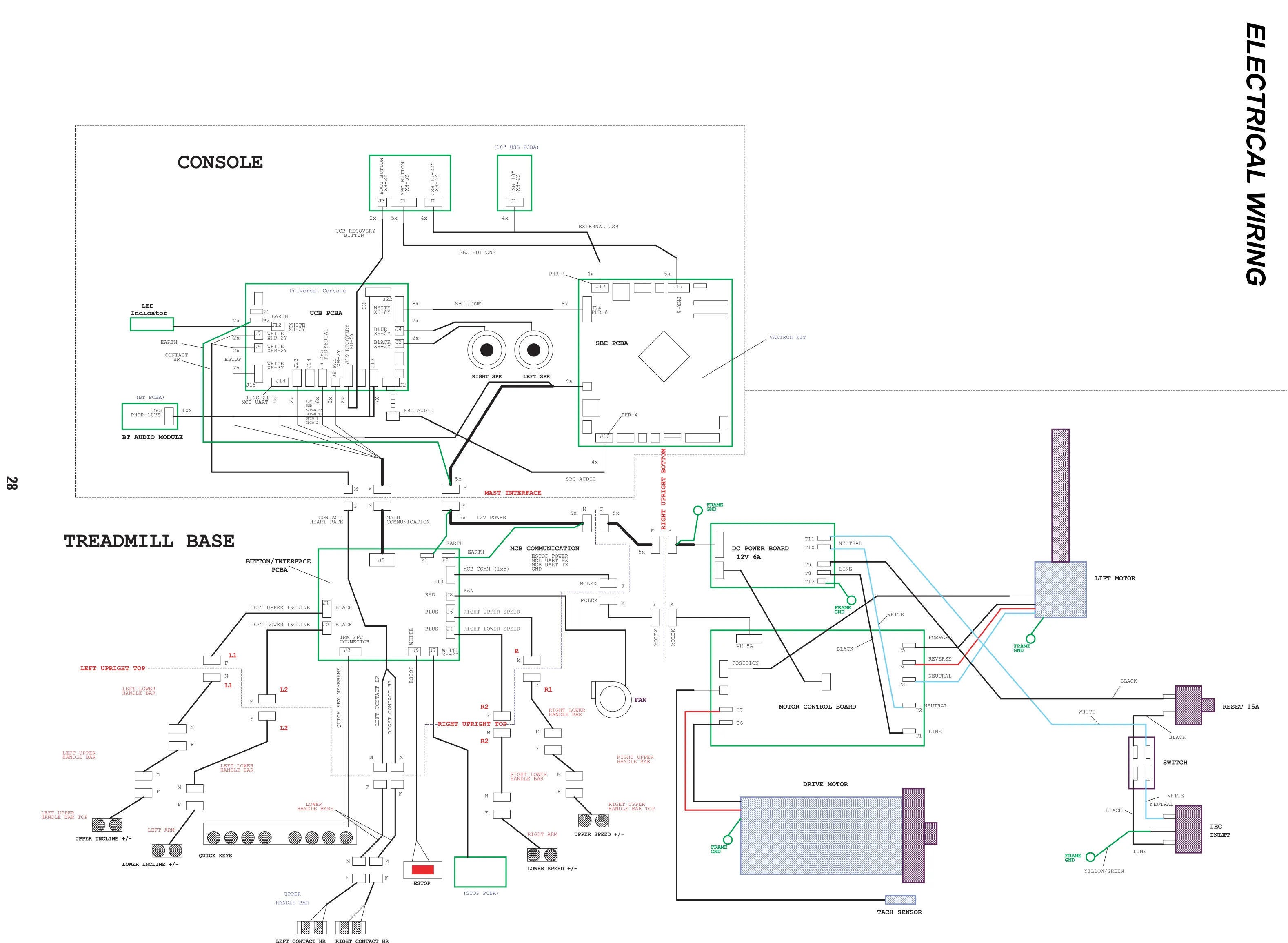
E concentrandoci specificamente su questa parte:
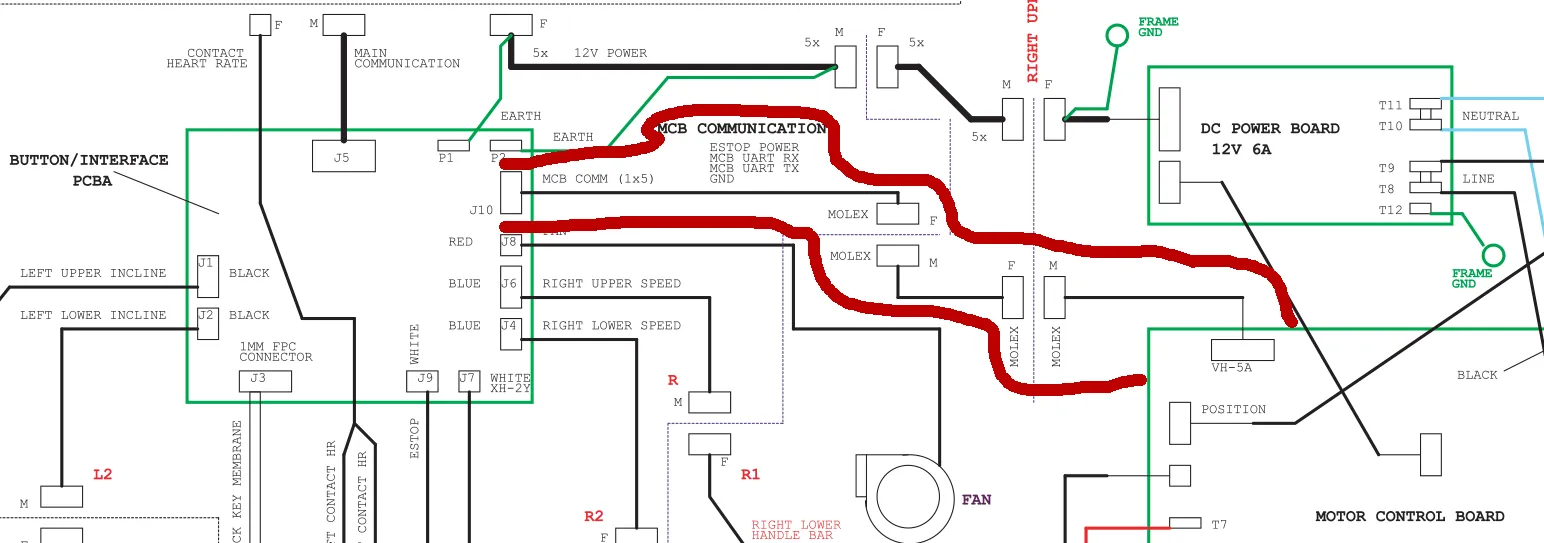
Possiamo identificare il “cavo di comunicazione” che collega il controller del motore come uno a 5 pin. C’è solo un connettore a 5 pin. Ho etichettato i cavi con i loro colori corrispondenti (i dati & l’interruttore sono optoisolati):
| Colore del cavo | Etichetta |
|---|---|
| rosso | GND |
| bianco | RXD |
| nero | TXD |
| giallo | +12 |
| verde | SW |
La scheda non è collegata direttamente alla console Android.
L’unico connettore a 5 pin è del marchio Molex. Una ricerca su Google di “connettori Molex piccoli” mi ha portato a un’immagine di ciò che chiamano Molex Micro-Fit 3.0 Single Row (5-Pin), che viene utilizzato per collegare la scheda di controllo del motore:

Esaminando NautilusLauncher.apk tramite jadx-gui, posso vedere che comunicano il tablet Android con la loro “Console Universale” usando Serial a 230400 Baud (utilizzando /dev/ttyS4). Questo NON è ciò che stiamo analizzando qui. Si riferisce alla comunicazione tra Android e la “Console Universale”. Indaghiamo la comunicazione tra la “Scheda di controllo dei pulsanti” e la “Scheda di controllo del motore”, eliminando così tre schede come possibili punti di guasto.
Tentare di collegare un ESP32 o un ponte Serial basato su CH340 direttamente ai cavi tra la base del tapis roulant e la scheda di controllo Bowflex ha fatto sì che la base del tapis roulant non si inizializzasse correttamente, dopodiché ho acquisito un analizzatore logico per indagare più a fondo.
Aggiornamento 2025
Nelle ultime settimane, e quasi tre anni dopo aver iniziato con questo progetto, diverse persone si sono messe in contatto con me per chiedere aggiornamenti a riguardo, confermando la mia supposizione iniziale che il sistema del tapis roulant è pessimo e che era solo questione di tempo prima che le macchine iniziassero a guastarsi. Mi è sembrato un buon momento per mettere in uso il mio analizzatore logico, che finora era rimasto inutilizzato.
Collegando l’analizzatore logico alle linee TXD e RXD (e GND, naturalmente), ho immediatamente potuto iniziare a intercettare messaggi tra entrambe le parti senza interrompere la comunicazione. Suppongo che inizialmente non riuscissi con un ESP32 per problemi di impedenza. Dopo alcuni minuti di prova e errore, sono arrivato alla seguente configurazione Serial:
- 2400 Baud
- 8 Bit per Frame
- 1 Stop Bit
- Nessun Bit di Parità
- Least Significant Bit Sent First
- TXD: Segnale Invertito
- RXD: Segnale Non InvertitoCon queste configurazioni ho potuto vedere messaggi chiaramente definiti.
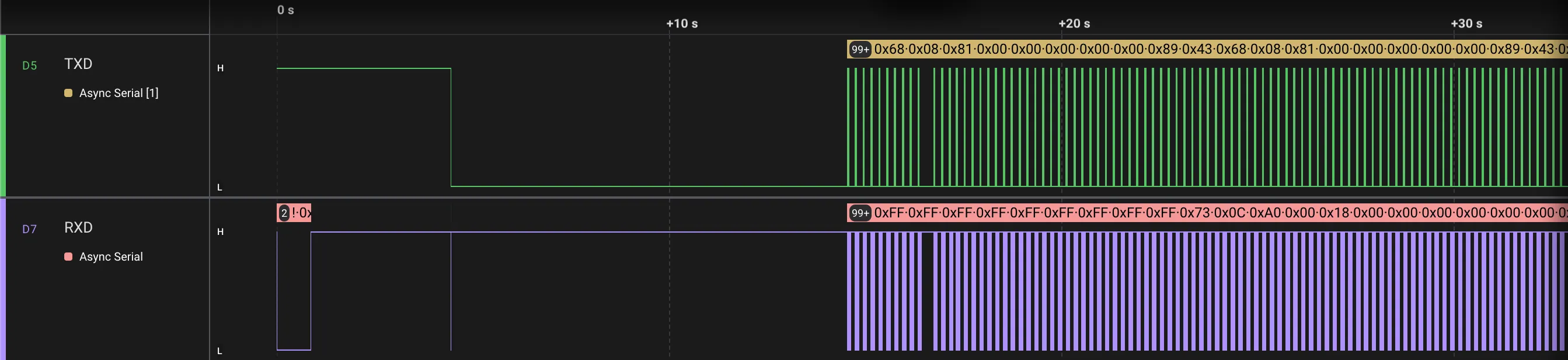
Intercettando messaggi UART durante il processo di accensione
Alcune cose di cui mi sono subito accorto:
- Tutti i messaggi inviati dai pulsanti iniziano con
0x68 - Tutti i messaggi inviati dalla scheda di controllo del motore iniziano con
0x73 - I messaggi di entrambe le parti terminano con
0x43 - In generale, i messaggi dei pulsanti vengono inviati 100ms dopo aver ricevuto un messaggio dalla scheda di controllo del motore
- Ad eccezione del processo di accensione, dove in un’istanza c’è una differenza di 300ms
- Il rumore presente nelle linee di comunicazione è incredibile, rendendo difficile la lettura dei messaggi
Con questo come base inizia il processo di decifrare i messaggi e comprendere cosa viene comunicato tra entrambe le parti, effettuando cambiamenti controllati in una routine di esercizi.
Intercettando cambiamenti nella velocità
Effettuando cambiamenti controllati a velocità specifiche, si possono osservare i seguenti valori inviati alla scheda di controllo del motore:
| Velocità sullo schermo | Messaggio inviato |
|---|---|
| 0,0 km/h (in attesa o pausa) | 0x68 0x08 0x80 0x50 0x00 0x0A 0x00 0x00 0xE2 0x43 |
| 2,0 km/h | 0x68 0x08 0x80 0x50 0x14 0x0A 0x00 0x00 0xF6 0x43 |
| 3,0 km/h | 0x68 0x08 0x80 0x50 0x1D 0x0A 0x00 0x00 0xFF 0x43 |
| 5,0 km/h | 0x68 0x08 0x80 0x50 0x31 0x0A 0x00 0x00 0x13 0x43 |
Si può osservare che cambia il byte 5 e il byte 9. Il byte 5 sembra essere la velocità in esadecimale, e il byte 9 sembra essere un checksum.
Convertendo i valori del byte 5 in decimale:
| Velocità sullo schermo | Esadecimale | Decimale |
|---|---|---|
| 0,0 km/h (in attesa o pausa) | 0x00 | 0 |
| 2,0 km/h | 0x14 | 20 |
| 3,0 km/h | 0x1D | 29 |
| 5,0 km/h | 0x31 | 49 |
Avendo decompilato alcune parti del sistema Android anni fa, ricordavo che configurando la macchina nel sistema metrico, internamente l’applicazione Bowflex effettua la conversione da sistema metrico a imperiale per comunicare con la “UCB”. La scheda di controllo del motore sembra utilizzare il sistema metrico, e a quanto pare c’è una perdita di precisione nella conversione da sistema metrico a imperiale e poi di ritorno a metrico (che è ciò che la scheda di controllo del motore si aspetta), dato che tutto viene gestito con una precisione di 1 decimale. Era così difficile farlo bene, Nautilus?
Considerando ciò, e applicando un fattore di scala di 10, coincide perfettamente con i valori inviati alla scheda di controllo del motore, quindi la formula sarebbe:
Valore in decimale = Velocità in km/h × 10Intercettando cambiamenti nell’inclinazione
Seguendo lo stesso processo utilizzato per la velocità, si possono osservare i seguenti valori inviati alla scheda di controllo del motore:
| Inclinazione sullo schermo | Messaggio inviato |
|---|---|
| -5° | 0x68 0x08 0x80 0x50 0x1D 0x00 0x00 0x00 0xF5 0x43 |
| 0° | 0x68 0x08 0x80 0x50 0x1D 0x32 0x00 0x00 0x27 0x43 |
| 9° | 0x68 0x08 0x80 0x50 0x1D 0x8C 0x00 0x00 0x81 0x43 |
In questo caso, il byte 6 sembra essere l’inclinazione in esadecimale, e conferma che il byte 9 è un checksum.
Convertendo i valori del byte 6 in decimale:
| Inclinazione sullo schermo | Esadecimale | Decimale |
|---|---|---|
| -5° | 0x00 | 0 |
| 0° | 0x32 | 50 |
| 9° | 0x8C | 140 |
La formula che fa coincidere perfettamente i valori inviati alla scheda di controllo del motore è:
Valore in decimale = (Angolo + 5) × 10Checksum
Questo sembra essere un checksum semplice e standard nei microcontrollori, sommando tutti i byte del messaggio e effettuando un overflow arrivato a 256. Una rappresentazione semplice sarebbe qualcosa come:
uint8_t calculateChecksum(uint8_t *msg) {
return msg[1] + msg[2] + msg[3] + msg[4] + msg[5] + msg[6] + msg[7];
}Utilizzando uint8_t come tipo di ritorno, l’overflow avviene naturalmente. Si potrebbe utilizzare un ciclo for sommando i valori e ritornare sum % 256, ma sarebbe più lento per i microcontrollori senza alcun beneficio reale.
Prossimi passi
- Ottenere una comprensione logica del processo di accensione, o almeno replicarlo
- Catturare le interazioni della chiave di sicurezza (la cosa rossa che si indossa sui vestiti)
- Interpretare i messaggi inviati dalla scheda di controllo del motore, che non dovrebbero differire molto dai messaggi inviati dalla scheda dei pulsanti
Considerando ciò, si può già replicare il funzionamento della scheda dei pulsanti, e con ciò controllare il tapis roulant da un microcontrollore.
— Continuerà —