
Controlador del Motor de la Trotadora - fl3xbl0w
Proyecto de ingeniería inversa. Comenzó con la trotadora Bowflex Treadmill 22 pero terminó generalizándose para cualquier máquina con Android vendida por Nautilus Inc. (Nautilus, Bowflex, Schwinn).
Esto aplica principalmente a la Treadmill 22 & Treadmill 56.
La placa de control del motor es fabricada por Electronics Way Industry.

Dado el manual de servicio proporcionado por Nautilus Inc. (respaldo en archive.org):

Y enfocándonos específicamente en esta parte:

Podemos identificar el “cable de comunicación” que conecta el controlador del motor como uno de 5 pines. Hay solo un conector de 5 pines. He etiquetado los cables con sus colores correspondientes (los datos & interruptor están optoaislados):
| Color del cable | Etiqueta |
|---|---|
| rojo | GND |
| blanco | RXD |
| negro | TXD |
| amarillo | +12 |
| verde | SW |
La placa no está conectada directamente a la consola Android.
El único conector de 5 pines es de la marca Molex. Una búsqueda en Google de “conectores Molex pequeños” me llevó a una imagen de lo que llaman Molex Micro-Fit 3.0 Single Row (5-Pin), que se utiliza para conectar la placa controladora del motor:

Al echar un vistazo en NautilusLauncher.apk a través de jadx-gui, puedo ver que comunican la tablet Android con su “Consola Universal” usando Serial a 230400 Baudios (usando /dev/ttyS4). Eso NO es lo que estamos analizando aquí. Eso se refiere a la comunicación entre Android y la “Consola Universal”. Investigamos la comunicación entre la “Placa controladora de la botonera” y la “Placa controladora del motor”, así quitando tres placas como posibles puntos de falla.
Intentar conectar un ESP32 o un puente Serial basado en CH340 directamente a los cables entre la base de la trotadora y la placa controladora Bowflex hizo que la base de la trotadora no se inicializara correctamente, tras lo cual adquirí un analizador lógico para investigar más a fondo.
Actualización 2025
En las última semanas, y casi tres años después de que empecé con esto, varias personas se han comunicado conmigo para preguntar por avances respecto a esto, confirmando mi suposición inicial de que el sistema de la trotadora es horrible y sólo era cosa de tiempo para que máquinas comenzaran a fallar. Me pareció buen momento para poner en uso mi analizador lógico, que hasta ahora sólo estaba guardando polvo.
Conectando el analizador lógico a las líneas TXD y RXD (y GND, por supuesto), inmediatamente pude comenzar a interceptar mensajes entre ambas partes sin interrumpir la comunicación. Supongo que inicialmente no pude con un ESP32 por temas de impedancia. Tras algunos minutos de prueba y error, llegué a la siguiente configuración Serial:
- 2400 Bauds
- 8 Bits per Frame
- 1 Stop Bit
- No Parity Bit
- Least Significant Bit Sent First
- TXD: Inverted Signal
- RXD: Non Inverted SignalCon esas configuraciones pude ver mensajes claramente definidos.
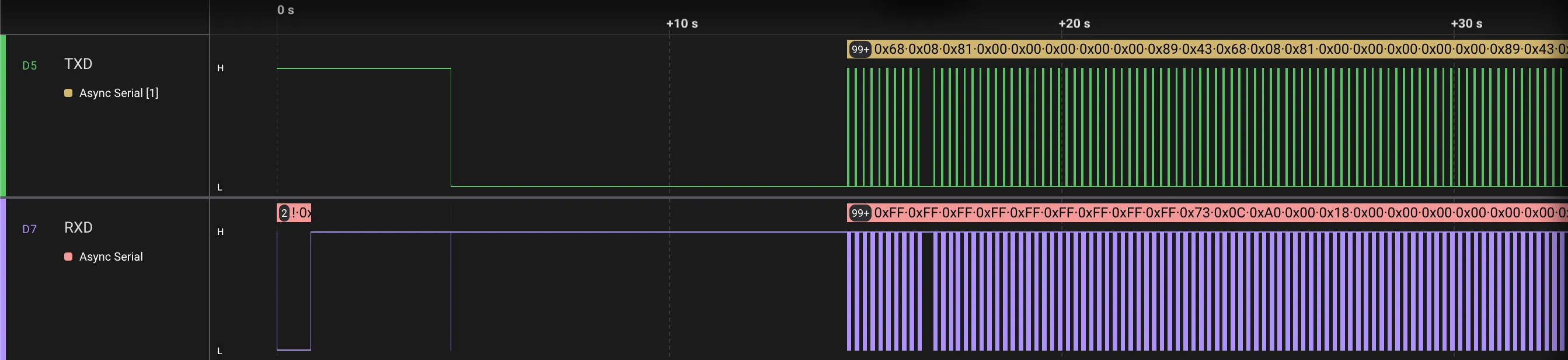
Interceptando mensajes UART en el proceso de encendido
Algunas cosas que me pude percatar de inmediato:
- Todos los mensajes que envía la botonera comienzan con
0x68 - Todos los mensajes que envía la placa controladora del motor comienzan con
0x73 - Los mensajes de ambas partes terminan en
0x43 - En general los mensajes de la botonera son enviados 100ms después de haber recibido un mensaje de la placa controladora del motor
- A excepción del proceso de encendido, donde en una instancia tiene una diferencia de 300ms
- El ruido que hay en las líneas de comunicación es increíble, dificultando la lectura de los mensajes
Con eso como base ya comienza el proceso de descifrar los mensajes y entender qué es lo que se está comunicando entre ambas partes, realizando cambios controlados en una rutina de ejercicios.
Interceptando cambios en la velocidad
Realizando cambios controlados a velocidades específicas, se puede observar los siguientes valores enviados hacia la placa controladora del motor:
| Velocidad en la pantalla | Mensaje enviado |
|---|---|
| 0,0 km/h (en espera o pausa) | 0x68 0x08 0x80 0x50 0x00 0x0A 0x00 0x00 0xE2 0x43 |
| 2,0 km/h | 0x68 0x08 0x80 0x50 0x14 0x0A 0x00 0x00 0xF6 0x43 |
| 3,0 km/h | 0x68 0x08 0x80 0x50 0x1D 0x0A 0x00 0x00 0xFF 0x43 |
| 5,0 km/h | 0x68 0x08 0x80 0x50 0x31 0x0A 0x00 0x00 0x13 0x43 |
Se puede observar que cambia el byte 5 y el byte 9. El byte 5 parece ser la velocidad en hexadecimal, y el byte 9 parece ser un checksum.
Pasando los valores del byte 5 a decimal:
| Velocidad en la pantalla | Hexadecimal | Decimal |
|---|---|---|
| 0,0 km/h (en espera o pausa) | 0x00 | 0 |
| 2,0 km/h | 0x14 | 20 |
| 3,0 km/h | 0x1D | 29 |
| 5,0 km/h | 0x31 | 49 |
Habiendo decompilado algunas partes del sistema Android años atrás, recordé que al configurar la máquina en sistema métrico, internamente la aplicación de Bowflex realiza la conversión de sistema métrico a imperial para comunicarse con la “UCB”. La placa controladora de motor parece usar sistema métrico, y al parecer hay pérdida de precisión en la conversión de sistema métrico a imperial y después de vuelta a métrico (que es lo que la controladora del motor espera), ya que todo se maneja con 1 decimal de precisión. ¿Era tan difícil hacerlo bien, Nautilus?
Teniendo eso en consideración, y si se aplica un factor de escala de 10, coincide perfectamente con los valores enviados a la placa controladora del motor, por lo tanto la fórmula sería:
Valor en decimal = Velocidad en km/h × 10Interceptando cambios en la inclinación
Siguiendo el mismo proceso que con la velocidad, se puede observar los siguientes valores enviados hacia la placa controladora del motor:
| Inclinación en la pantalla | Mensaje enviado |
|---|---|
| -5° | 0x68 0x08 0x80 0x50 0x1D 0x00 0x00 0x00 0xF5 0x43 |
| 0° | 0x68 0x08 0x80 0x50 0x1D 0x32 0x00 0x00 0x27 0x43 |
| 9° | 0x68 0x08 0x80 0x50 0x1D 0x8C 0x00 0x00 0x81 0x43 |
En este caso el byte 6 parece ser la inclinación en hexadecimal, y me confirma que el byte 9 es un checksum.
Pasando los valores del byte 6 a decimal:
| Inclinación en la pantalla | Hexadecimal | Decimal |
|---|---|---|
| -5° | 0x00 | 0 |
| 0° | 0x32 | 50 |
| 9° | 0x8C | 140 |
La fórmula que hace coindidir perfectamente los valores enviados a la placa controladora del motor es:
Valor en decimal = (Ángulo + 5) × 10Checksum
Este parece ser un checksum simple y estándar en microcontroladores, sumando todos los bytes del mensaje y haciendo un overflow llegado a 256. Una representación sencilla sería algo como:
uint8_t calculateChecksum(uint8_t *msg) {
return msg[1] + msg[2] + msg[3] + msg[4] + msg[5] + msg[6] + msg[7];
}Al utilizar uint8_t como tipo de retorno, el overflow ocurre naturalmente. Podría utilizarse un for loop sumando los valores y retornar sum % 256, pero sería más lento para los microcontroladores sin ningún beneficio real.
Próximos pasos
- Obtener un entendimiento lógico del proceso de encendido, o al menos replicarlo
- Capturar interacciones de la llave de seguridad (la cosa roja que se coloca en la ropa)
- Interpretar los mensajes que envía la placa controladora del motor, que no deben diferir mucho de los mensajes que envía la botonera
Teniendo eso ya se puede replicar el funcionamiento de la botonera, y con eso se puede controlar la trotadora desde un microcontrolador.
— Continuará —